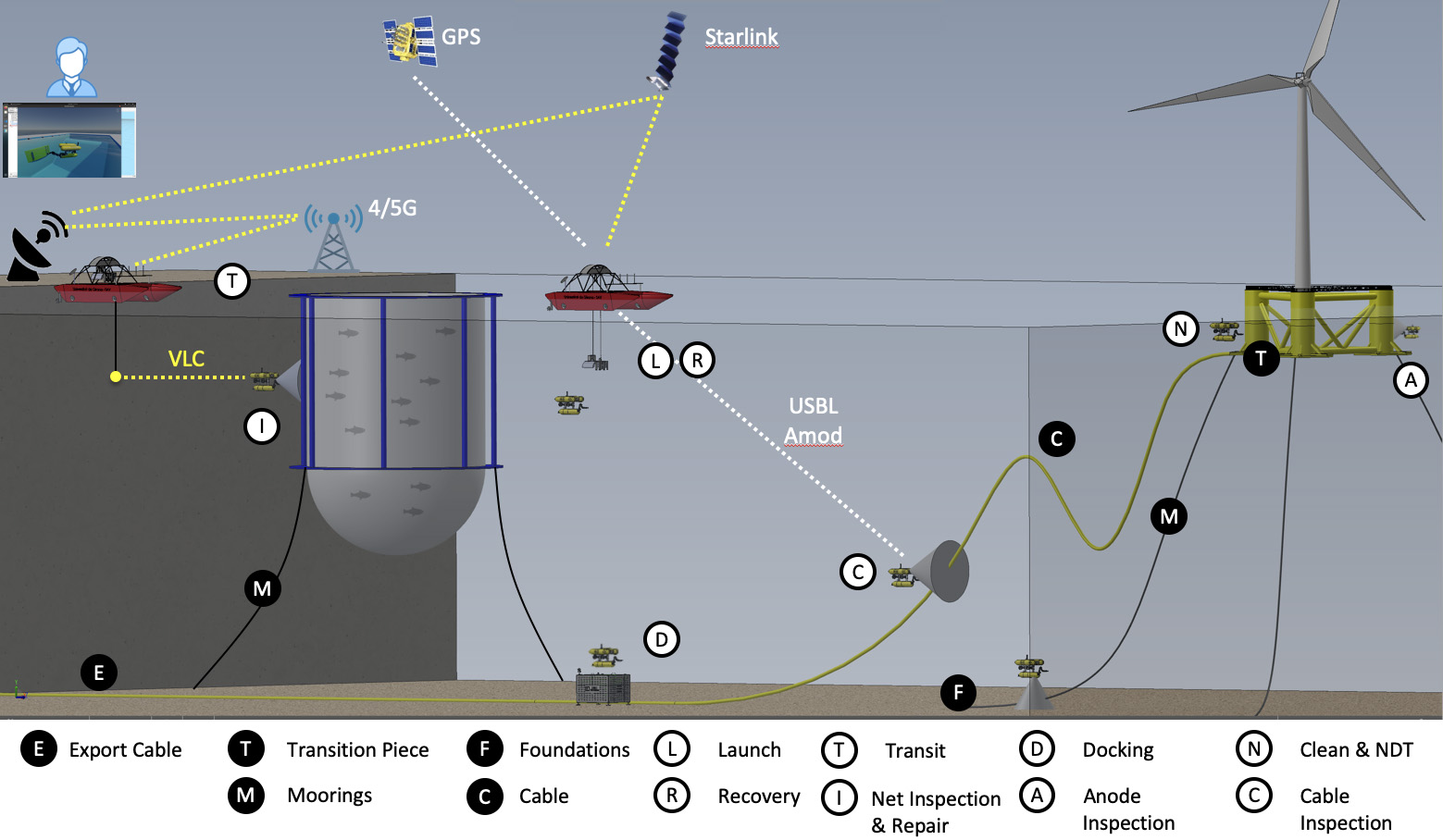
The general objective of the TANDEM project is the use of an autonomous marine robotic tandem to automate IMR tasks in offshore infrastructures (wind and fish farms). The tandem will consist of a heterogeneous team of robots composed of an ASV capable of autonomously transporting and deploying an I-AUV by means of a LARS. The surface vehicle will also provide location and communication coverage. The underwater vehicle will be equipped with an intervention payload consisting of a bi-manual system, a laser scanner, cameras, and a high-speed optical link. The project envisages the development of a new intelligent control architecture integrating control, localization, planning, and perception technologies to address the main inspection and intervention scenarios.